【DCモーター】モーターの選定
何かを動かすには 動力源が必要です。
動力には、タービンやロケットと言った特殊なものから、誰もがお世話になる自動車のエンジン、そして一番身近なものが 今回の『モーター』ではないでしょうか。
そしてモーターにも沢山の種類があります。
ACモーター、DCモーター、サーボモーター、ステッピングモーター・・・etc
その中で今回は、民生品などでよく使われる『DCモーター』の記事となります。
モーター選定、、案外難しくないですか?
機構の設計でよく利用するモーターですが、適正なモーターを選ぶのは意外と難しいものです。
それはモーターの種類やサイズが多く、専門用語などもあるり、どれが適正か分からないこと。
次に、設計者にとって、モーターを選定する業務の頻度はそんなに多くないこと。
あとは、類似品や過去に使われているものを流用すれば、ある程度利用できてしまうこと。
等があると思います。
しかし ただの利用者ならばそれでも良いのでしょうが、生み出す側の設計者であれば、ある程度 理解して決める必要があると思います。
そのため今回は 機構設計者として 必要なスキルの範囲で『DCモーターの選定』をしてみます。
回路などの電気的なアプローチではなく、あくまでも機械設計者側からのアプローチになります。
また細かい技術計算や、詳細な構造などは、モーターメーカーなどの資料を調べてください。
DCモーターとは?
『DCモーター』は、モーターの中で一番基本的なモーターです。
そして構造によって『ブラシ付きDCモーター』と『ブラシレスDCモーター』、そして『ステッピングモーター』の3種類がります。
『ステッピングモーター』は別の機会に記載するとして、ここでは他の2つについて説明します。
2つの違いは、流す電流をモーターの中で回る『回転子』に供給するか、回らない固定側に供給するかの違いです。
細かい構造説明は控えますが、興味のある方は下記サイトを参照ください。
→→→東芝デバイス&ストレージ
ただ機構の設計者としては、モーター選定にあたって次を押さえておく必要があります。
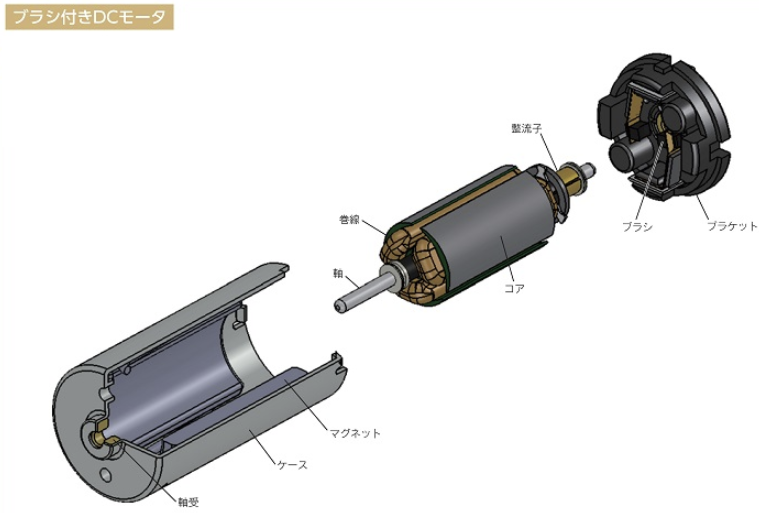
ブラシ付きDCモーターのメリット/デメリット
- 構造が簡単でローコスト
- ブラシが摩耗するので寿命が短い
- 接点からノイズや発塵が発生
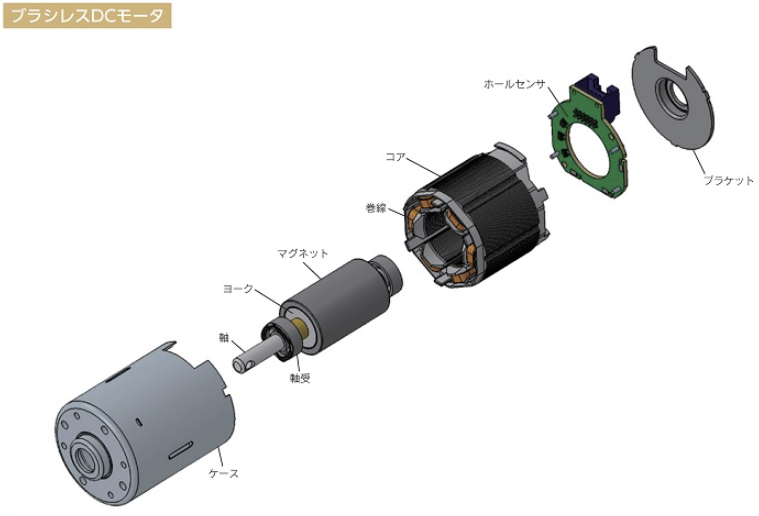
ブラシレスDCモーターのメリット/デメリット
- ブラシ付きに比較して寿命が長い
- ノイズが少なく発塵も少ない
- ブラシ付きに比較して効率が良い
- ブラシ付きに比較して高コスト
玩具やノベルティなどの、コストが優先する場合はブラシ付きDCモーター。
家電品などの民生品で、品質も必要となれば、ブラシレスDCモータ-といった使い分けになります。
選定1 機構を決める
製品の仕様として、最終的に必要となる出力は決まっていると思います。
製品の設計者はその仕様を満足するため、まず「どんな機構を使って動作させるか」を考えます。
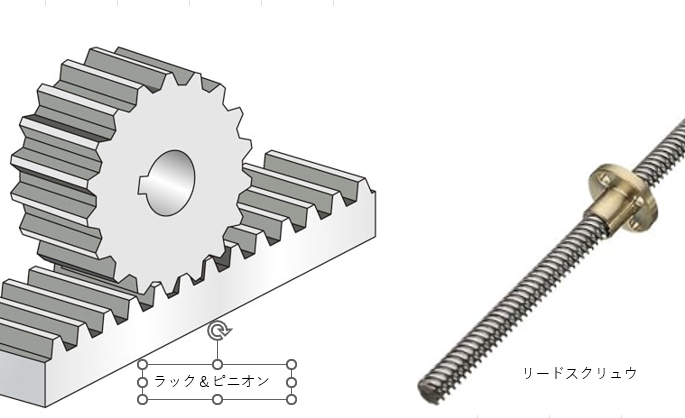
例えば素早く動かしたい場合は 『ラック&ピニオン』を使うとか、できるだけ力が欲しい場合は 『リードスクリュウ』にするとかです。
そして機構が決まるとモーターの、概略の負荷計算を行います。
ここで限必要となるのは、以下の負荷条件です。
・移動する物体のサイズと重量
・可動部分の摩擦係数
・動作時間の目安
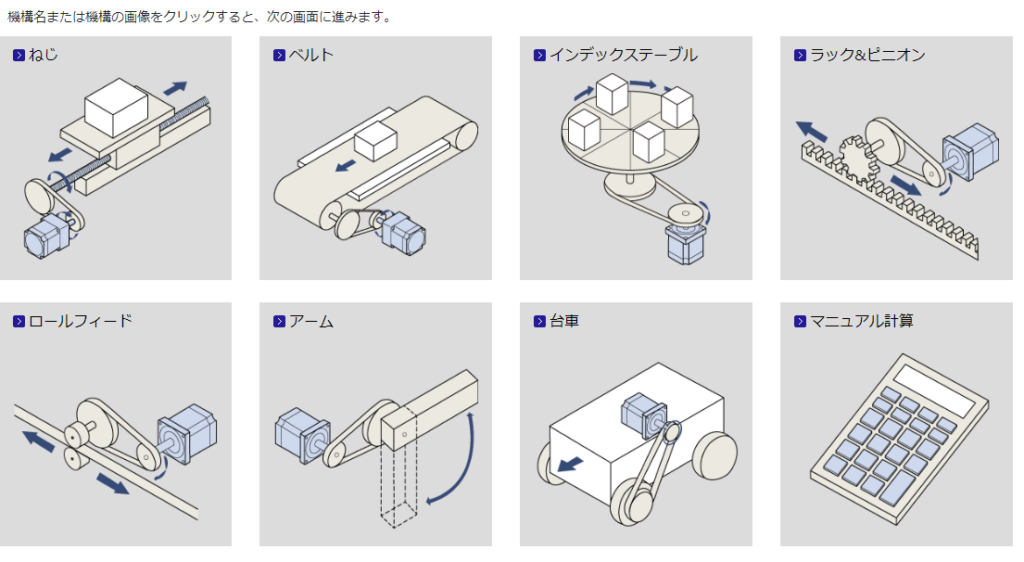
この条件を基に負荷計算を行いますが、利用する機構によって計算方法が違います。
幸い下記のサイトに、機構毎の計算ツールが載っていますので、この公式を利用して算出してください。
ここまで行えばモーターに必要な出力が求められます。
出力が決まれば、加速時のトルクと定速時のトルクを求めて、モーターは決まります。
・・・とはいえ、これは条件がある程度合致する場合です。
ここで選定したモーターは、ひとまず仮決めとしておきます。
搬送機、生産設備などの設備設計は大体これでokですが、製品設計の場合、サイズ的な要件からも見てみる必要があるからです。
選定2 モーターサイズから目安を付ける
機構が決まると、ざっくりですが『利用できるモーターサイズ』も見えてきます。
スペースに余裕があればいいのですが、大抵の場合は小さなスペースの割に大きな力が必要だったりします。
目安のサイズを基に、モーターメーカーの中から、対象となる候補をリストアップしておきます。
参考までに代表的なDCモーターのメーカを挙げておきます。
*この他にも、沢山のDCモーターメーカーがあります。
選定3 モーターの定格電圧を決める
一般的な民生品は、用途によってある程度 使える内部電源の電圧が決まっています。
ポータブル機器や小型精密機器であれば DC3V~5V。
家電品や車載関連などは 9V~15V。
力強さが必要な工具などは、24V~
マイコンやICは3.3V~5Vで動作しますので、この電圧は大抵の機器に使われています。
まずはこれらの電源にあったモーターを選びます。
選定するモーターは、「機器の供給電圧に合わせる」ことになります。
もちろんモーター専用に電源回路を作ればどんなモーターでも使えますが、それでは無駄なコストアップになります。
先ほどのモーターサイズから選定した中から、更に電圧で絞り込みます。
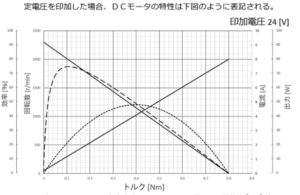
選定4 トルクと回転数を見る
次は具体的なモーターの特性から選びます。
おそらくモーター選定が難しいと感じるのは、ここからだと思います。
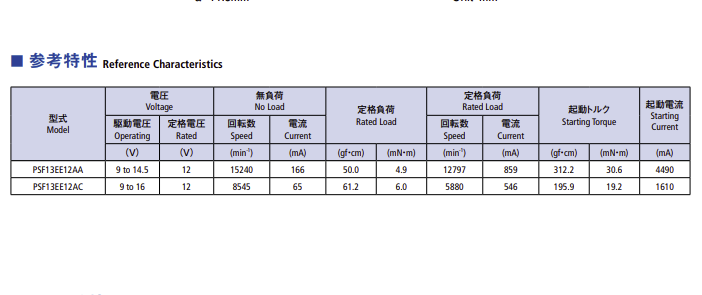
モーターには 『定格負荷』と『定格回転』という指標が必ずあります。
webサイトによっては省略されたりしますが、これがないと選定は出来ないので、無い場合は取り寄せてください。
まずは定格負荷(定格トルク)を見て、モータ-を選びます。
最終的な必要出力が決まっており、機構の目安が付いていれば、モーターに必要なトルクの目安も付きます。
これにはある程度の経験が必要になるかもしれませんが、ざっくりとした『減速比』を掴んでおき、モーターで発生させたいトルクの目安をとするのです。
表には無負荷と定格と起動の3つの状態で、数値が入っていますが、この時点では『定格負荷』『定格トルク』を見て選びます。
次にそのモーターの定格回転数を確認します。
DCモーターは比較的小型のため、どうしても高回転のタイプが多くなります。
回転が高過ぎると、必要以上に減速が大きくなったり、逆にあっという間に動作が終わってしまうことになります。
そして先ほどモーター電圧で絞り込んだ候補の中から、希望のトルクと回転数に近いものを選ぶことになります。
しかし実際の設計では、必ずしも近いものが有るとは限りません。
モーターメーカーはたくさん有りますが、メーカーの指定があったり、タイプが既に決められていたりするほうが多い気がします。
そうなると今度は、モーターに合わせて機構を変えて 再度、モーターの選定プロセスを行うこととなります。
このあたりは機構設計の大変な所でもあり、楽しみな所でもあります。
選定5 定格でしか使えないの?・・いいえ大丈夫!
ここまで、『定格電圧』で動作し、『定格トルク』を発生して、『定格回転』するモーターを選定しました。
もしくはできるだけ近いものを選びました。
確かにこの3つが一定ならば、DCモーターは一定の回転、一定の力を発生します。
しかし実際の製品においては、負荷が変わらない製品は少ないのでは無いでしょうか。
一つの例を挙げます。
例えば下のパンタグラフ機構。
縮んだパンタグラフが伸びることで、ステージをしたから上に押し上げる機構です。
色の付いた状態が縮んだ位置、透明な状態が上に持ち上がった位置です。
2つのリンクの下側を中央に寄せることで、下から上側へ大きく伸びる機構です。
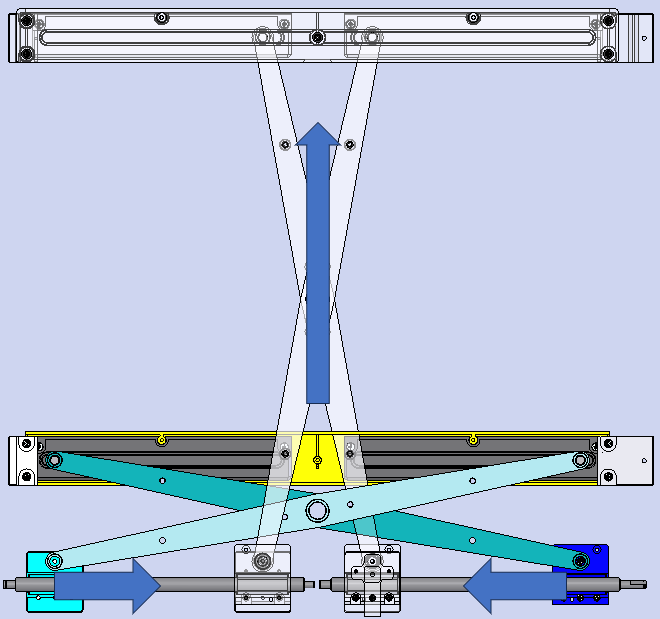
少し極端な配置にしましたが、中央に寄せる力 必要なトルクは、動作の初めと終わりでは大きく違います。
動作の初めは大変重く、動作の終盤は軽いのです。
これを『定格トルク』で動くモーターを選んだ場合、余裕がありすぎ、大きすぎるモーターになってしまいます。
そこでこんな場合は、『起動トルク』もしくは『停動トルク』の値を見ます。
モーターは、停止から動き始めの時(起動時)が、最大のトルクを発生するのです。
最大トルクを使うことはできませんが、一時的であればそれに近いトルクも利用可能です。
実際には、機器の最大負荷をが起動トルクの50%程度ならば、利用可能と判断していいのではないでしょうか。
そのため「『定格電圧』はともかく、『定格トルク』と『定格回転数』についてはある程度の目安」と考え、『起動トルク』の半分くらいまでなら使えると思っていいと思います。。
*この目安の付け方たは、あくまで初期のモーター選定での考えです。
実際にはモーターメーカーに使用条件を提示して確認をしてください。
※Solidowrks を活用して設計した事例を、分野別にたくさん掲載しています。
→→→ここから見に行く
株式会社アイディック3D
〒468-0015 名古屋市天白区原3-304-1
TEL:052-804-9811 / FAX:052-801-5881